[04:09 UTC]
[Sat, 20 Apr 2024]
|
Hardware Reviews
|
Editorial Review [13 May 2003]
| | |
DiSEqC 1.2 motors - Mini group test (Page 1 of 4)
Introduction
 The
reason for buying a motorized setup is quite simple - there are hundreds
of satellites in the sky, with Europe alone keeping over 70 of world's
active satellites in geostationary orbit with a main purpose of bouncing
TV signals to our households. Satellite enthusiasts might as well want
to take a peek at them too, right? The
reason for buying a motorized setup is quite simple - there are hundreds
of satellites in the sky, with Europe alone keeping over 70 of world's
active satellites in geostationary orbit with a main purpose of bouncing
TV signals to our households. Satellite enthusiasts might as well want
to take a peek at them too, right?
Any
dish driving device, has two main tasks to fulfil:
First is the ability to move from point to point on the Clarke belt, where
the Geostationary satellites are located, in a fairly consistent and reproducible
way. This task, in a manner of speaking, is easy and obvious.
Its
second duty would be stop at any target destination with high precision.
Our dish has to be able to pinpoint objects in the firmament, roughly
22,000 miles away with an error margin of less than 1 degree, and the
bigger your dish the more accurately you need to be able to position it.
|
 All
the above has to be done despite weather conditions and natural forces
like wind and exposure of metal parts to extreme temperatures. The smaller
the inaccuracies, the better. Obviously the motor unit has to be cheap
enough to be even considered as an option by the buyer while still remaining
profitable for the manufacturer. Take that into consideration and you
will quickly understand why most makers avoid at all costs manufacturing
rotors for dishes bigger than 1.20cm or 12kg in weight. As for the customer's
needs, it didn't take long before the industry realised the two main dos
and don'ts of the whole H-H affair, with the most important being the
cost and the noise. The sound issue won't bother owners of detached houses
too much, but if you happen to share your walls with your neighbours you
will always find someone upset enough by the aesthetics of your satellite
setup to not be willing to put up with additional noise of your dish browsing
around in search of new channels. Luckily years of experience have done
the required magic and the manufacturers have come up with most of the
possible solutions, including slowing down the rotation by using different
gearing, or using nylon/nylon-coated parts instead of metal to hush the
grinding noises a little. All that helped solve the problem, and spare
our sensitive neighbour's ears a lot, it has to be said. I brought this
test to extremes providing you with samples of what every tested motor
sounds like just to give you an idea of eventual impact of your hobby
on your relationships inside local community (smile). All
the above has to be done despite weather conditions and natural forces
like wind and exposure of metal parts to extreme temperatures. The smaller
the inaccuracies, the better. Obviously the motor unit has to be cheap
enough to be even considered as an option by the buyer while still remaining
profitable for the manufacturer. Take that into consideration and you
will quickly understand why most makers avoid at all costs manufacturing
rotors for dishes bigger than 1.20cm or 12kg in weight. As for the customer's
needs, it didn't take long before the industry realised the two main dos
and don'ts of the whole H-H affair, with the most important being the
cost and the noise. The sound issue won't bother owners of detached houses
too much, but if you happen to share your walls with your neighbours you
will always find someone upset enough by the aesthetics of your satellite
setup to not be willing to put up with additional noise of your dish browsing
around in search of new channels. Luckily years of experience have done
the required magic and the manufacturers have come up with most of the
possible solutions, including slowing down the rotation by using different
gearing, or using nylon/nylon-coated parts instead of metal to hush the
grinding noises a little. All that helped solve the problem, and spare
our sensitive neighbour's ears a lot, it has to be said. I brought this
test to extremes providing you with samples of what every tested motor
sounds like just to give you an idea of eventual impact of your hobby
on your relationships inside local community (smile). |
What
is DiSEqC and how does it work?
After
the satellite boom in 80s and 90s many Asian and European manufacturers
came up with custom mounts pushed and pulled by mechanical actuators.
Besides being quite sturdy and strong-armed this solution to every day
TV viewer has proven to have just as many disadvantages as favours. Exposed
moving parts were prone to wearing out, the construction itself was often
hard to adjust and tune for non-professionals and most of all, the setup
required multiple cabling from a stand alone or integrated positioner
laced outside buildings and windows.
By
1997 the German satellite giant Eutelsat decided to design a simple protocol
whereby rotor devices could be operated via set of commands forwarded
by the receiver through the same cable used for feeding signal from the
LNB. Eutelsat already had a Digital Satellite Equipment
Control protocol version 1.0 in place, allowing receivers to switch
between up to four dishes or signal feeders, and revision 1.1 for scaling
DiSEqC 1.0 by four times. Version 1.2 of the protocol introduced a few
new commands required specifically for the purpose of moving the dish
across the horizon.
The
idea of using a single cable to power both rotor and LNB wasn't new -
Nokia had already similar protocol known as Vsec implemented in their
products and few other manufacturers worked on own proprietary systems,
often, like in case of Irte Omnisat, much more advanced and scalable.
However, thanks to impact of the name and good PR Eutelsat's system was
a sure winner, and completely free to implement by manufacturers at that.
|
But how is it
done?
Well,
let's get back to last decade and look at the first digital receivers
- what features did we have available? There was a 14 and 18V supply
to LNB, to receive vertical and horizontal transponders, and a 22kHz tone
to switch between bands.
A
DiSEqC 1.2 positioner can operate a motor by inserting nanosecond gaps
for few milliseconds into the existing 22 kHz tone. It is all very clever.
Each message is followed by 6 millisecond silence so both the sender and
receiver (master and slave) understand where one command ends and another
starts. But there is absolutely no reason for me to get into details and
graphs here, if you want to know more about the timings and insertion
of the gaps simply refer to protocol manuals available for free from Eutelsat
website. |
The structure of
the commands sent between the positioner and the motor is quite simple.
They all consist of three parts:
A
[Framing byte] an
[Address byte] and a [Command
byte]
The
command byte may be accompanied by additional data bytes.
If
we step outside the boring manuals and uninspiring, strict boundaries
for a second, perhaps I can explain it better. Imagine that the [Framing
byte] is equivalent to an explicit introduction so to
speak - similar to "Listen mate" in common speech - and so variations
of this prologue can be thought of as:
"Listen carefully
mate and keep quiet for a sec" (E0 in hex)
"Listen mate" (implying
" and feel free to tell me what you think") (E1) and
"Listen to me mate
and I really need your answer"(E2). |
The
[Address byte] is to define
the "mate" we are talking to - e.g. a motor driving from East
to West would be codenamed 31, an elevation motor driving up and down,
or controlling tilt has handle 32, anything/everything on the line is
referred to as 30. There are other possibilities too - "Yo, skew controller"
is 21, "polarizer, my dude" is 20. These however are rarely used.
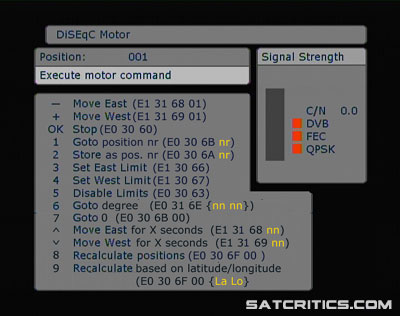
Finally
the [Command byte] is the
orders we give:
60 Halt -
Stop moving
63 Limits Off
Disable Limits
66 Limit E
Set East Limit (& Enable recommended)
67 Limit W Set
West Limit (& Enable recommended)
68 Drive East Drive
Motor East (with optional timeout/steps)
69 Drive West Drive
Motor West (with optional timeout/steps)
6A Store nn Store
Satellite Position & Enable Limits
6B Goto nn Drive
Motor to Satellite Position nn |
Plus
few extra commands, not mandatory, but defined:
64 PosStat
Read Positioner Status Register
6E Goto x.x Drive
Motor to Angular Position (degrees)
6F Set Positions
(Re-) Calculate Satellite Positions
To
get our unit to move our dish to position 2 stored in the motor's memory
we would say "Listen motor, mate, move to 2, would you?" or E1 31 6B 02
in hex. Simple. |
If manufacturers wanted to
implement all DiSEqC 1.2 commands the menus could be long... |
But
let's imagine we don't have anything stored in motor's memory at all and
want to watch something on Sirius. We can say "Listen mate, move that
motor east" (E1 31 68 (value)). But how do we tell the motor to stop or
how far to go? The move command has the extra data byte for us to describe
the movement. 00 would be "drive that dish till I tell you to stop". Hex
values between 01 and 7F, or 1 and 127 tell the motor to drive x amount
of seconds "drive that dish for 5 seconds". Negative hex values between
255-1 and 255-126 (80h' to FFh') tell motor how many steps to move "nudge
that dish 5 steps". So to find our Sirius, we look at signal strength
meter and say at least "Listen mate, move that motor till I tell you to
stop" (e1 31 6b 00) and when the signal scale rise we shout "Listen carefully
everyone and keep quiet for a sec... stop now!" (e0 30 60). We can then tell
motor to remember where we are and store it as numbered position "Listen
everyone, and keep quiet for a sec - remember the current point as position
two" (e0 30 6A 02).
|
Technically, because
of backward compatibility, the specification demands DiSEqC 1.2 equipment
should also support the mandatory DiSEqC 1.0 and 1.1 commands. That would
extend the list by
58 Write Freq Write
channel frequency
38 Write N0 Write
to Port group 0 (Committed switches)
39 Write N1 Write
to Port group 1 (Uncommitted switches)
00 Reset
Reset DiSEqC microcontroller
but good luck with
finding any receiver that has those working while motorized options are
enabled.
|
| | |
|
|
|
|
[User Hardware]
Tell us about your receiver.
Help others make a right choice!
Submit short
User Review.
We'll make new database for 2012

|
|
[ Forum Stats ]
8 forums
368 topics
1910 posts
2103 registered users
[ Usenet stats ]
361778 posts
18564 topics
1 guest
1 member
reading forum right now..
Register Now!
|
|
|